Stabilisierung
Projektteam
Nathan Plieger
Nathan Plieger
Projektidee
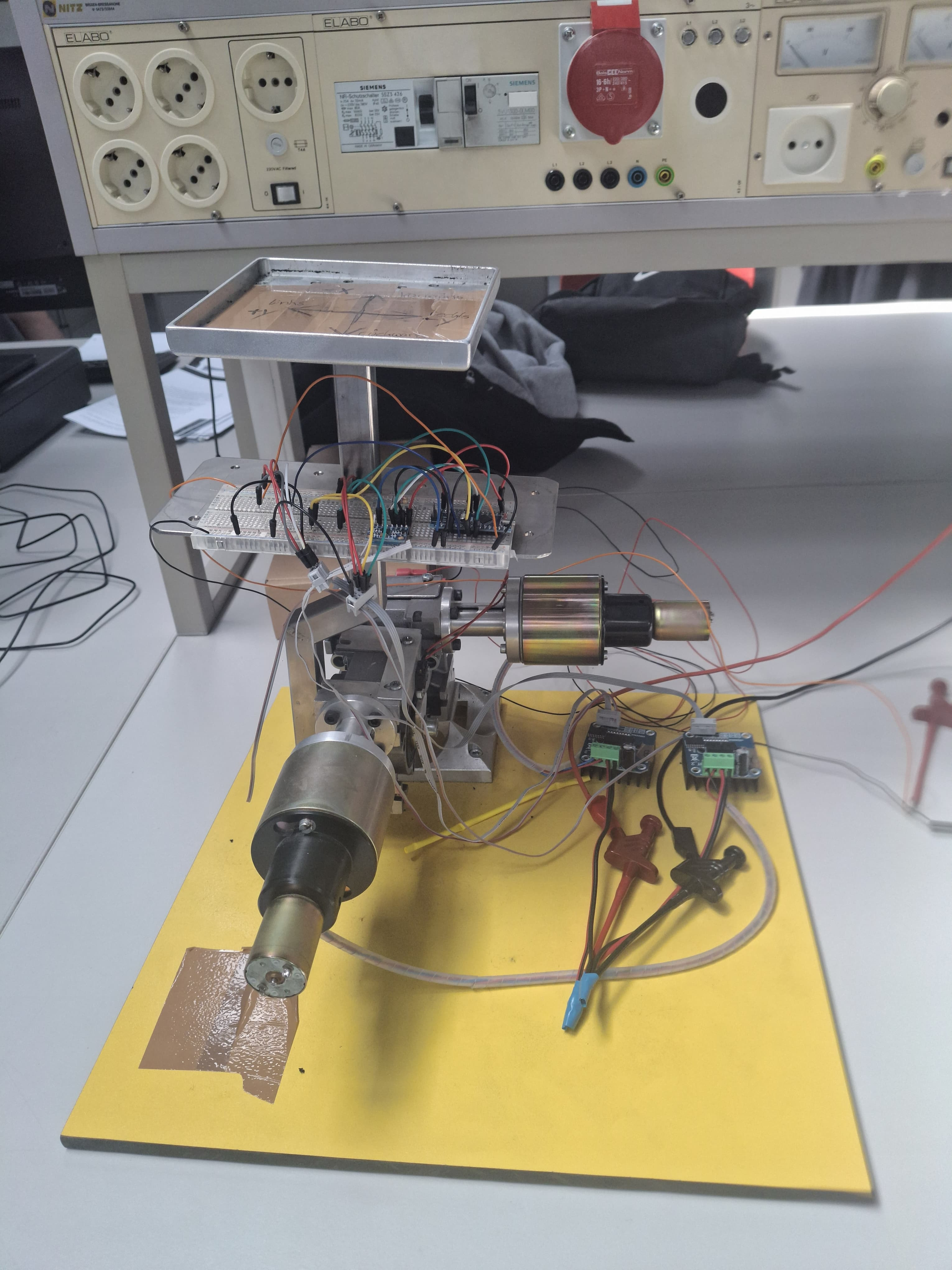
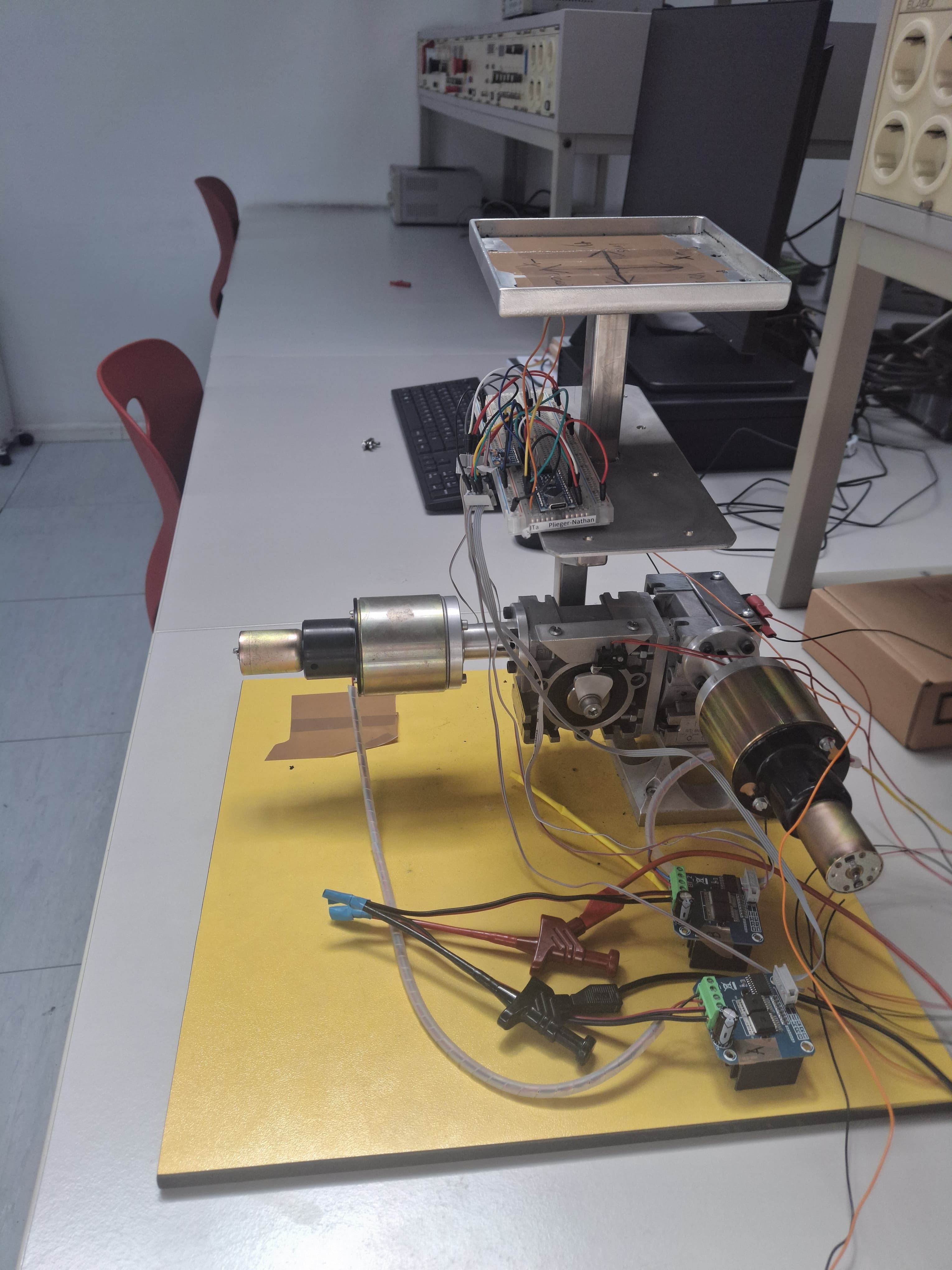
Eine Plattform auf einem fix montierten Gerüst soll zu jeder Zeit waagerecht gehalten werden, damit die Objekte auf der Plattform nicht herunterfallen. Dafür wird ein Gyrosensor verwendet, der die Lage bestimmt und dann basierend auf der Abweichung Motoren zum Ausgleichen ansteuert.
Funktionsweise
- Gyrosensor MPU-6050 für die Bestimmung der Ausrichtung
- ATMega328p Microcontroller als zentrales Rechenelement
- Zwei Driver für die Ansteuerung der Motoren über den Microcontroller
- Zwei Endschalter, damit die Motoren nicht in einen blockierdenden Zustand gelangen können
Daten und Fakten
Spannung der Motoren: 20VDCVersorgungsspannung für Microcontroller und Driver: 5VDC
Maximaler Strom: 1.3ADC
Maximale Leistung der Motoren: 30W
Messrate des Gyrosensors: 100 Messungen pro Sekunde
Fotos