SmartCam System
Moritz Hanny
Projektidee
Die Grundidee dieses Projekts ist die Entwicklung einer drahtlosen, ferngesteuerten Kameraplattform. Ziel ist es, eine Kamera aus der Distanz über einen Bluetooth-Joystick präzise in zwei Achsen (Schwenken und Neigen) zu steuern. Das ist besonders nützlich, um Kameras an schwer zugänglichen Orten flexibel auszurichten.
Damit das System auch unbeaufsichtigt sicher aufgestellt werden kann, ist eine RFID-Zugriffskontrolle integriert: Nur mit der richtigen Schlüsselkarte lässt sich die Plattform bedienen. Kombiniert mit einem zuschaltbaren LED-Blitz und basierend auf komplett selbst entwickelten Platinen entsteht so ein kompaktes, sicheres und smartes Kamera-Tool.
Funktionsweise
- Systemstart & RFID-Sperre (Standby)
- Autorisierung & Freischaltung
- Datenerfassung am Transmitter (Sensoren einlesen)
- Datenpaketierung & Bluetooth-Übertragung
- Non-Blocking Empfang (Receiver)
- Horizontale Bewegung (Schrittmotor / Pan)
- Vertikale Neigung (Servomotor / Tilt)
- Videoübertragung mit WIFI
Daten und Fakten
Schrittmotor: 12V DCServomotor: 6V DC
Systemarchitektur & Steuerung:
Mikrocontroller: 2x AVR (ATmega328P), 16 MHz Taktfrequenz
Software: Hardwarenahes C, Non-Blocking Code
Timing: Hardware-Timer-Interrupts (z.B. Timer1: 250 µs, Timer2: 10 µs)
Mechanik & Aktorik:
X-Achse (Pan): Schrittmotor (NEMA 17), 1/8 Microstepping-Betrieb
Y-Achse (Tilt): Servomotor, hochauflösende Software-PWM (10 µs Steps)
Beleuchtung: Stufenlos dimmbarer LED-Blitz via PWM
Kommunikation & Sicherheit:
Eingabe: Analoger 2-Achsen-Joystick, Encoder, Trimmer, Taster
Funkstrecke: Bluetooth-Modul (HC-05), UART mit 9600 Baud
Sicherheit: RFID-Modul (RC522) als Hardware-Wegfahrsperre
Elektronik & Spannungsversorgung:
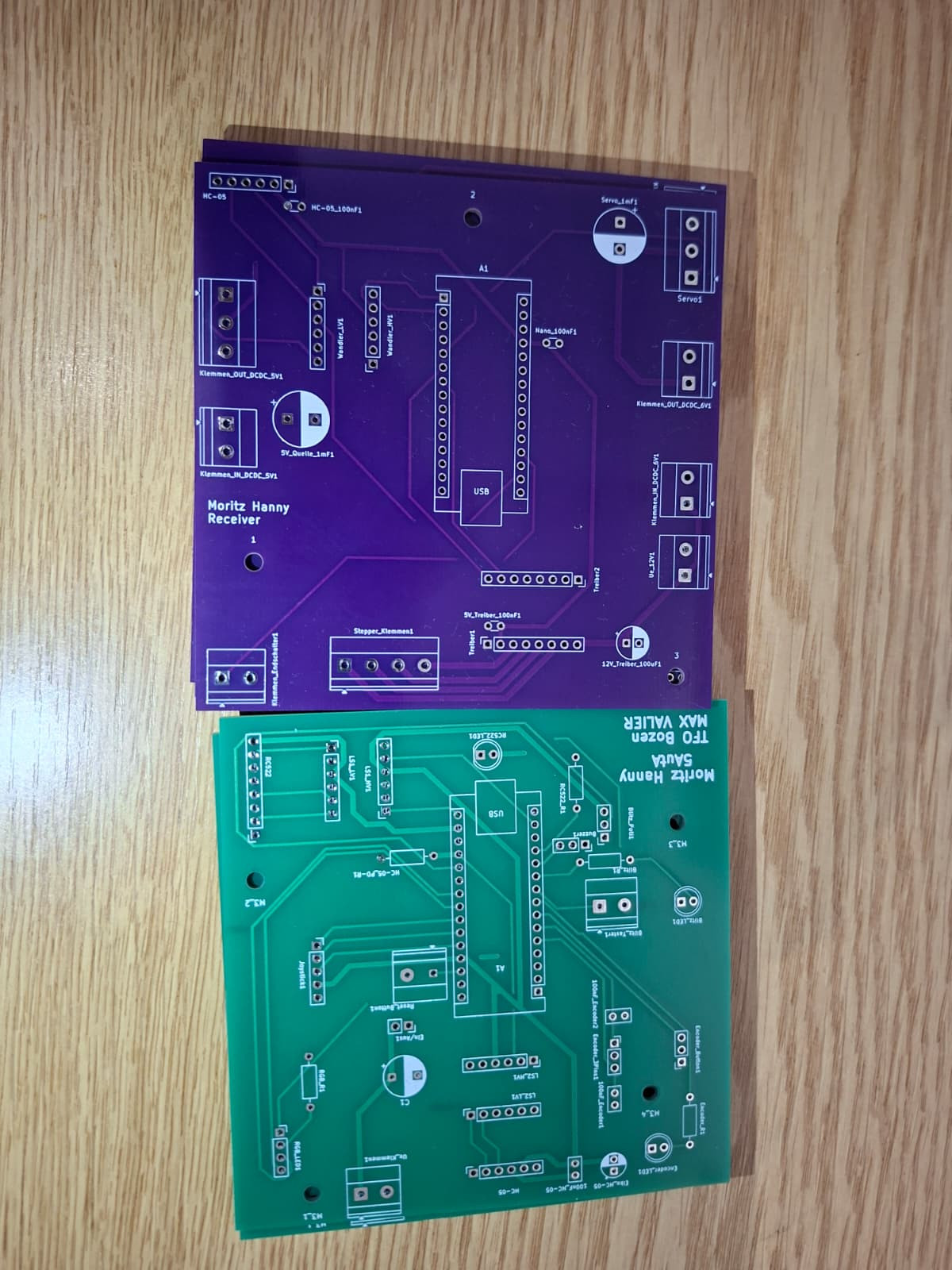
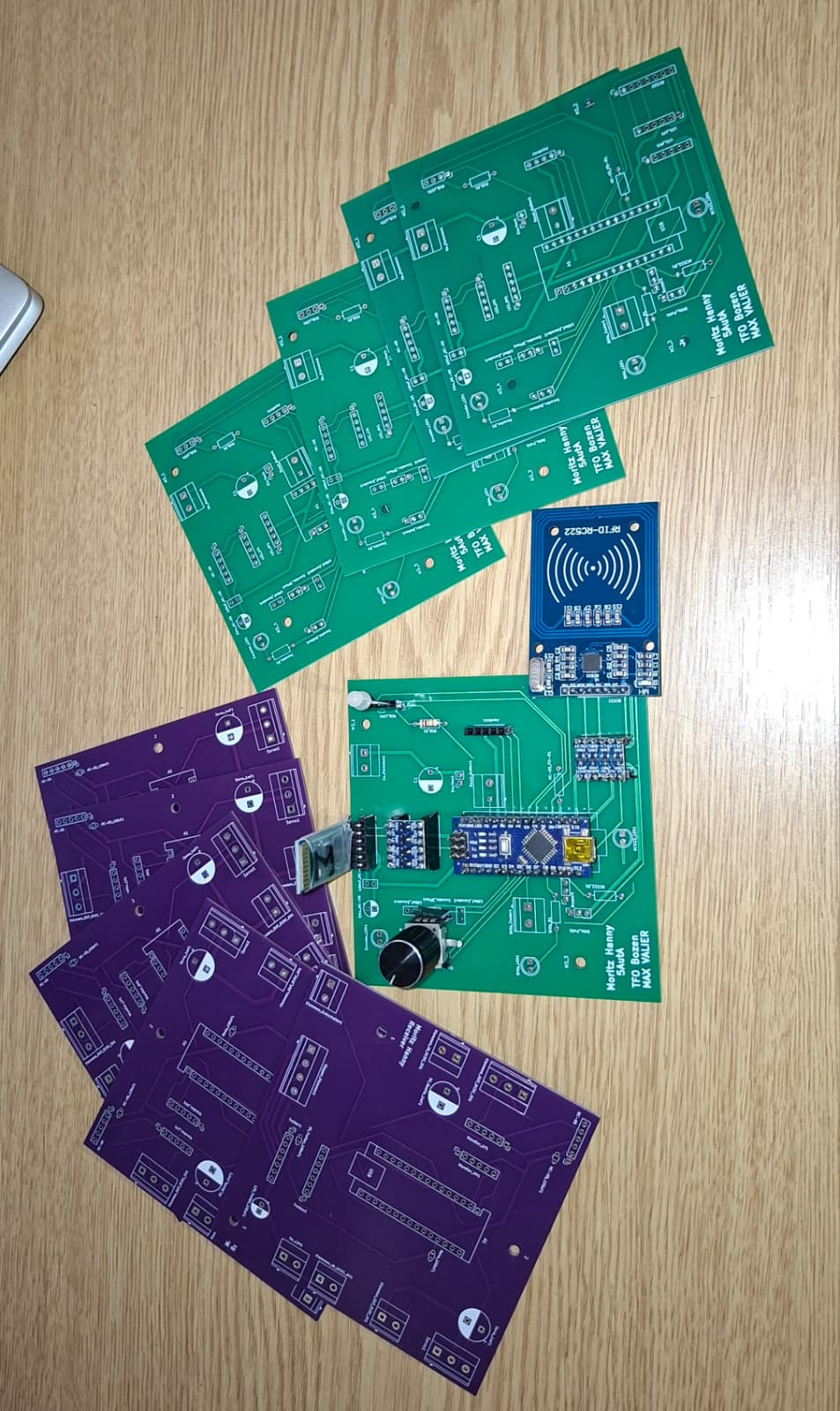
Platinen: Eigens entwickelte PCBs (Receiver + Transmitter)
Logikspannung: 5V DC
Motorspannung:
Detaillierte Projektbeschreibung
Das Ziel dieses Maturaprojekts ist die Konzeption und Realisierung einer drahtlos steuerbaren Kamera-Positionierungsplattform. Das System ermöglicht es, eine Kamera aus der Distanz flexibel und ruckelfrei auszurichten, was besonders für Aufnahmen in schwer zugänglichen oder sensiblen Umgebungen von Vorteil ist. Das Projekt zeichnet sich durch einen stark interdisziplinären Ansatz aus und vereint Mechanik, Elektronik-Design (Custom-Platinen) und komplexe Softwarearchitektur.
Mechanik und Hardware-Design
Das Herzstück des Systems bildet eine mechatronische Schwenk-Neige-Plattform (Pan-Tilt-Mechanismus). Für die präzise Bewegung auf den zwei Achsen kommen ein Schrittmotor (Stepper) sowie ein Servomotor zum Einsatz. Die gesamte Steuerungselektronik basiert auf eigens dafür entwickelten und gefertigten Platinen. Ein integriertes, stufenlos dimmbares LED-Blitzlicht sorgt zudem für eine optimale Ausleuchtung der Aufnahmeszene.
Kommunikation und Steuerung
Die Bedienung der Plattform erfolgt vollständig kabellos. Dafür wurde eine separate Transmitter-Einheit entwickelt, die mit einem Joystick ausgestattet ist und die Steuerbefehle in Echtzeit via Bluetooth an die Empfangseinheit der Basisstation übermittelt.
Softwarearchitektur und Performance
Um die Latenz minimal zu halten und eine maximale Systemstabilität zu gewährleisten, werden die Mikrocontroller in hardwarenahem C programmiert. Ein besonderes technologisches Merkmal ist das implementierte Interrupt-gesteuerte Multitasking auf Basis von unabhängigen Hardware-Timern. Dieser Ansatz verhindert blockierende Prozesse (Non-Blocking-Code) und garantiert absolut flüssige, parallele Motorbewegungen bei gleichzeitigem Datenempfang.
Sicherheitskonzept
Da Kamerasysteme oft unbeaufsichtigt betrieben werden, verfügt die Basis über eine integrierte Hardware-Wegfahrsperre in Form einer RFID-Zugriffskontrolle. Das System bleibt physisch und elektronisch gesperrt und ignoriert externe Steuerbefehle, bis es durch eine autorisierte Schlüsselkarte freigeschaltet wird.
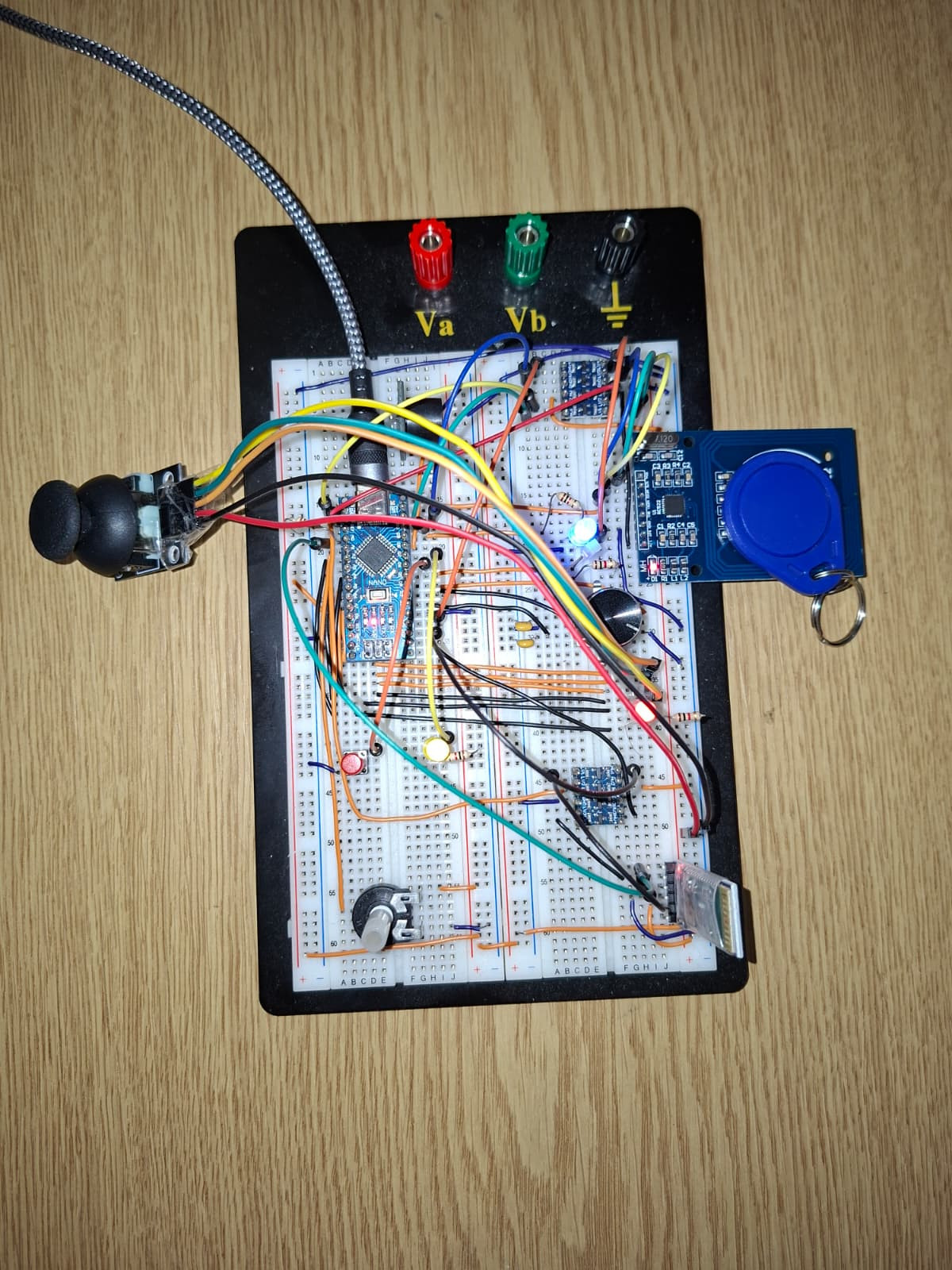
Fotos