Fernsteuerung
Projektteam
Darren Moore
Darren Moore
Projektidee
Mein Projekt ist die Entwicklung einer selbstgebauten, modularen Fernsteuerung für ein RC-Auto.
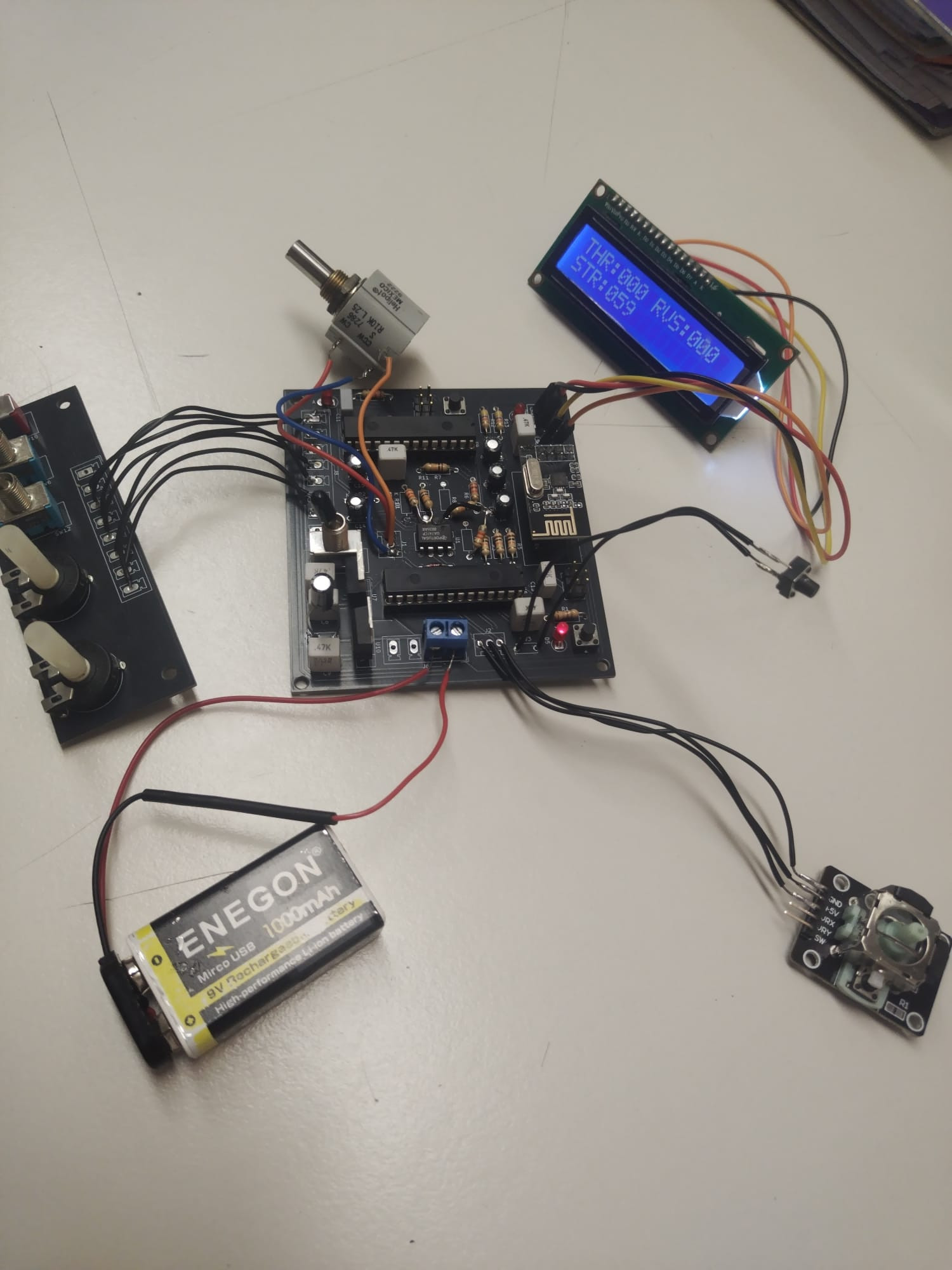
Die Steuerung basiert auf ATmega88 und kommuniziert drahtlos über nRF24L01. Eingaben wie Lenkung und Gas erfolgen über Joystick und Trimmer, während ein LCD-Display wichtige Werte wie Steuerprozente anzeigt.
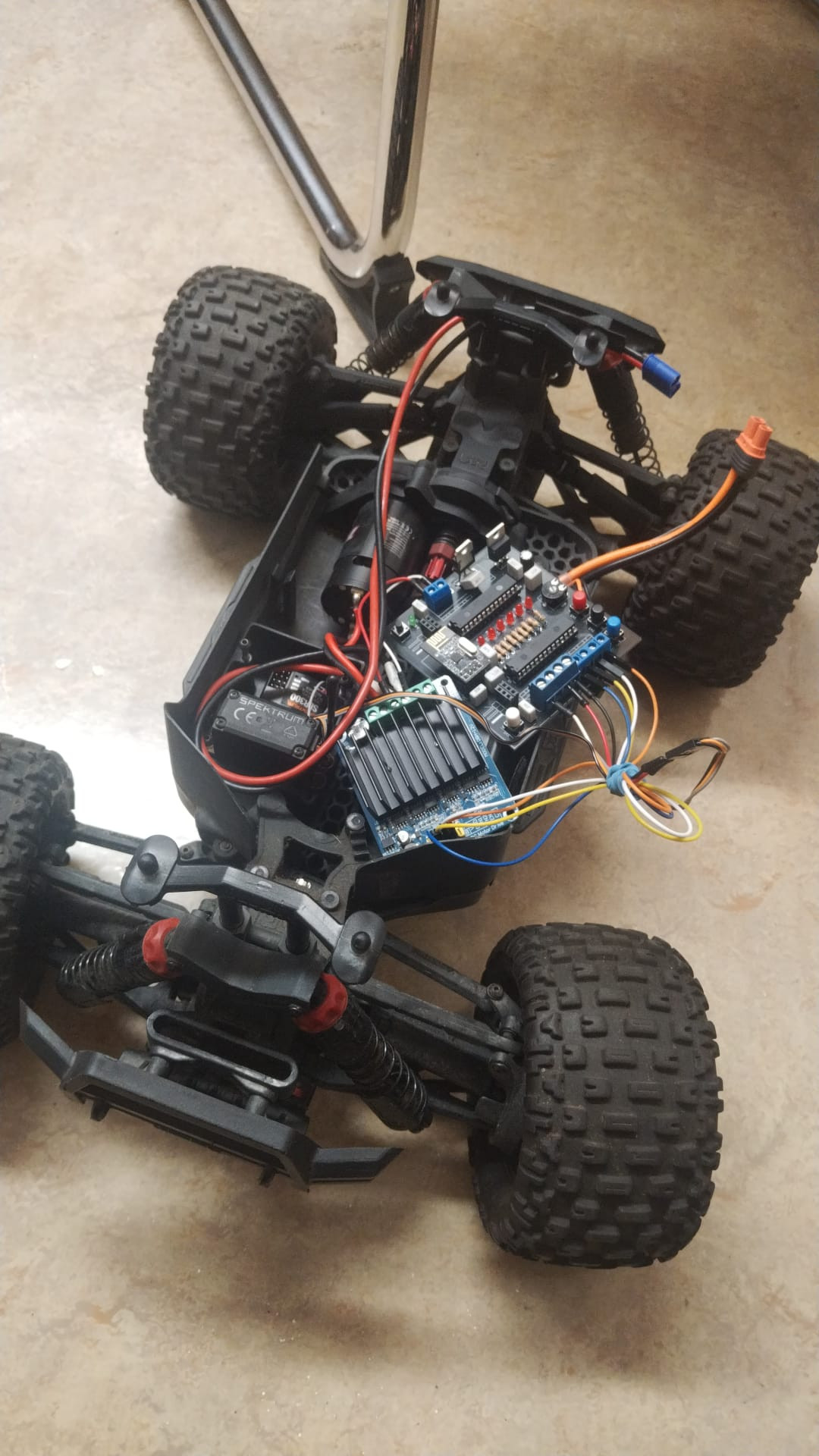
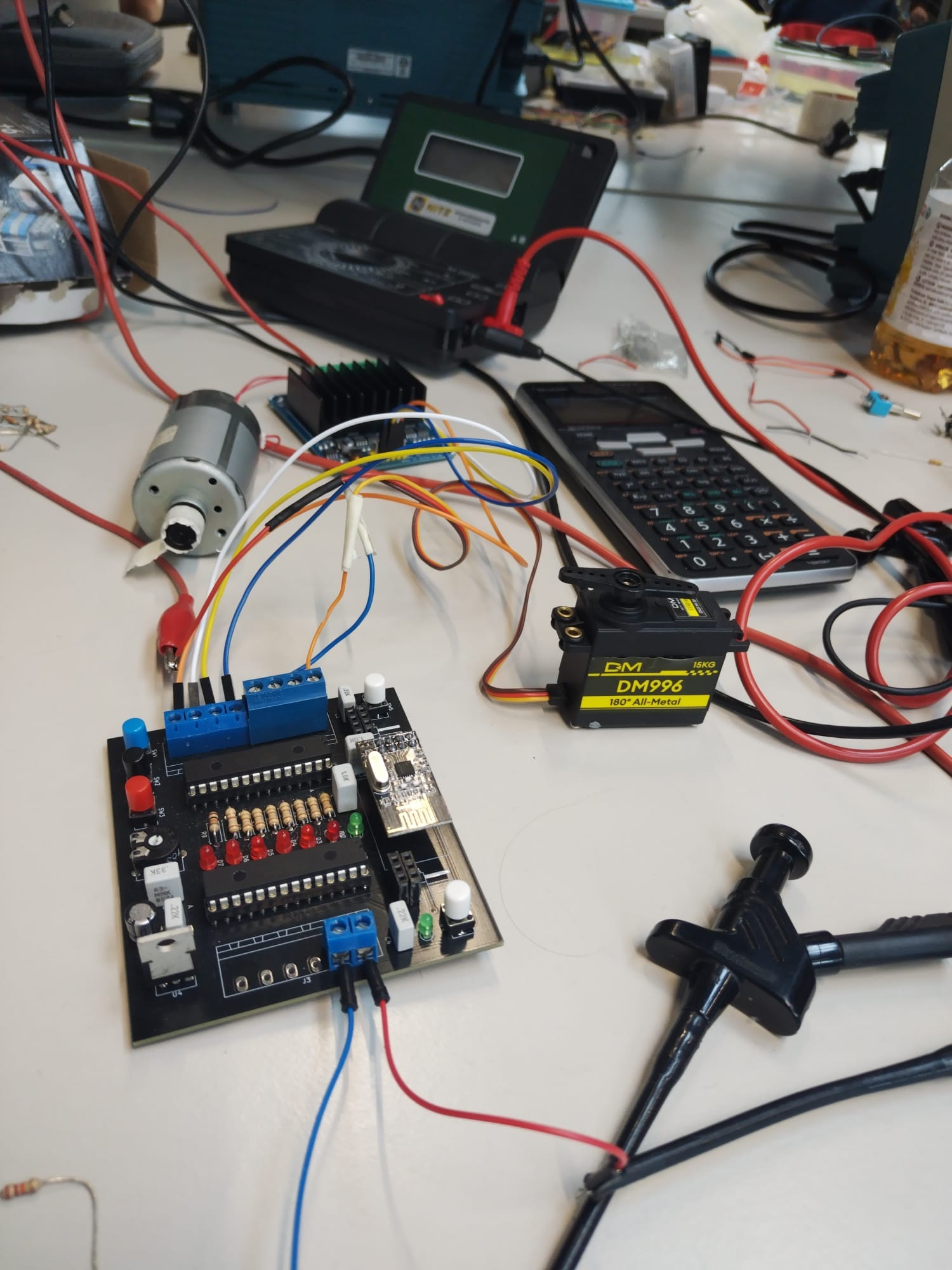
Das Signal wird an einen Empfänger im Fahrzeug gesendet, wo ein Mikrocontroller einen Servo (Lenkung) und einen DC-Motor (Antrieb) steuert.
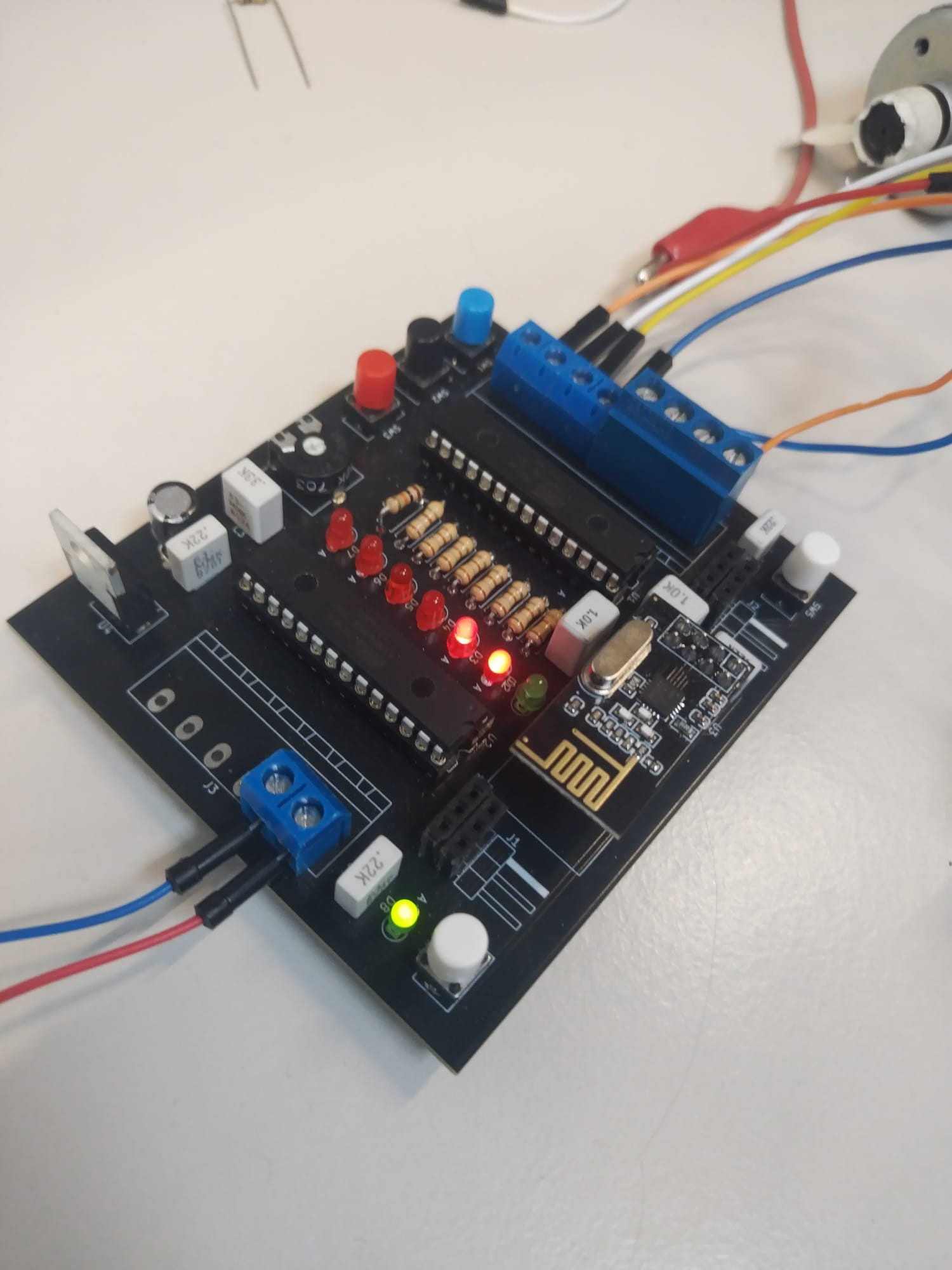
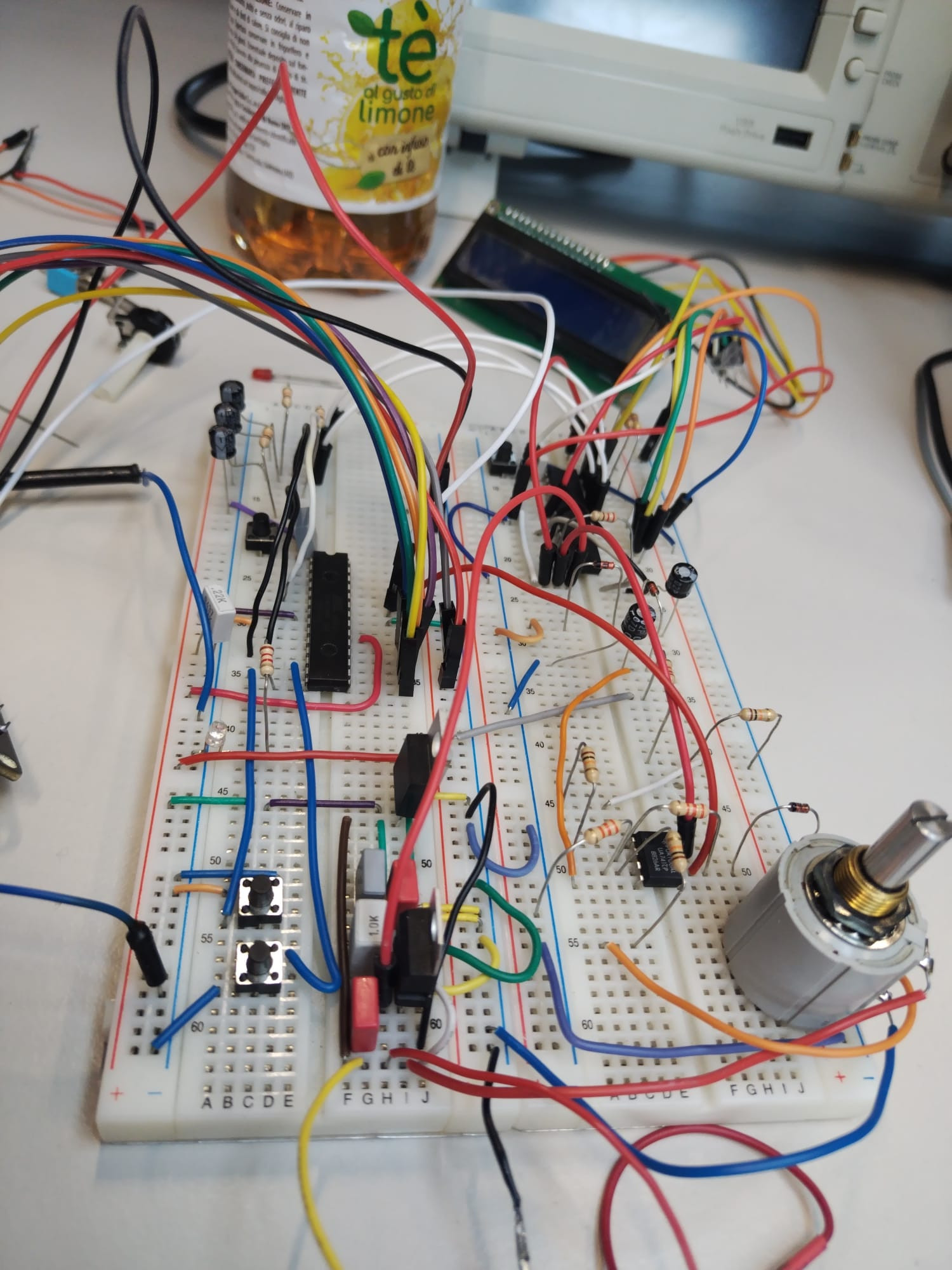
Das Projekt wurde zuerst auf einer Steckplatine entwickelt und anschließend als eigene, professionelle Leiterplatte bei JLCPCB umgesetzt und in ein 3D-gedrucktes Gehäuse integriert.
Ziel war eine zuverlässige, präzise, benutzerfreundliche und erweiterbare Fernsteuerung.
Funktionsweise
- Die Funktionsweise meiner Fernsteuerung lässt sich in vier Schritte aufteilen:
1. Eingabe (Sender):
Der Benutzer bewegt den Joystick für Lenkung und Gas/Bremse. Die analogen Spannungen werden vom ATmega88 eingelesen.
Trimmer + Subtrahierschaltung → Kalibrierung (Nullpunkt einstellen)
Joystick → liefert variable Spannungen für Steering und Throttle
Diese Werte werden in digitale Prozentwerte umgerechnet.
2. Verarbeitung & Anzeige:
Die berechneten Werte werden:
über ein LCD (via I²C) angezeigt (z. B. % für Gas, Bremse, Lenkung)
gleichzeitig für die Übertragung vorbereitet
3. Funkübertragung:
Die Daten werden mit dem Funkmodul nRF24L01 drahtlos (2,4 GHz) an den Empfänger gesendet.
4. Empfang & Umsetzung (Auto):
Ein weiterer ATmega88 empfängt die Daten und verarbeitet sie:
Servo bekommt ein 50 Hz PWM-Signal → Pulsbreite bestimmt die Lenkposition
Motortreiber steuert den Gleichstrommotor → Vorwärts/Rückwärts + Geschwindigkeit
Die Energieversorgung erfolgt mit Batterien.
Daten und Fakten
Mein Projekt ist eine selbstentwickelte drahtlose Fernsteuerung für ein RC-Auto.Die Steuerung basiert auf dem Mikrocontroller ATmega88.
Die Kommunikation erfolgt über nRF24L01 im 2,4-GHz-Bereich.
Ein Joystick ermöglicht die Steuerung von Lenkung sowie Gas und Bremse.
Ein Trimmer dient zur Kalibrierung und Feinjustierung der Lenkung.
Die Eingabewerte werden als analoge Spannungen erfasst und digital verarbeitet.
Ein LCD-Display zeigt Werte wie Steuerung in Prozent über I²C an.
Die Daten werden drahtlos an den Empfänger im Fahrzeug gesendet.
Dort verarbeitet ein weiterer Mikrocontroller die empfangenen Signale.
Ein Servo wird über ein 50-Hz-PWM-Signal für die Lenkung gesteuert.
Ein Motortreiber regelt den Gleichstrommotor für den Antrieb.
Die Stromversorgung erfolgt beim Sender über eine 9-V-Batterie.
Beim Empfänger wird eine 7,4-V-LiPo-Batterie verwendet.
Spannungsregler erzeugen 3,3 V für Logik/Funk und 5 V für Display bzw. Servo.
Fotos